近日,必赢官网项楠教授/倪中华教授团队在微流控技术促进软体机器人自主化、无绳化和智能化方面取得重要进展,研究系统回顾了微流控技术在软致动器、软控制系统和软泵等软体机器人学关键领域的广泛应用和最新进展,揭示了微流控与软体机器人学高度相关的技术体系和相辅相成的发展规律,相关成果以“Microfluidic Strategies in Soft Robotics: Actuators, Control Systems, and Pumps”为题发表在《Cell》旗下新期刊《Device》上。
主要内容:
与刚性部件相比,智能、自主且不受束缚的软机器人具有更高的顺从性和适应性,致使其更适用于环境探索、人机交互和医疗援助等应用。软机器人的运动和能量转换在很大程度上依赖于柔性致动器、控制系统和泵。可传统方法仍然无法摆脱外部刚性元件。对于这个问题,微流控技术已成为一种有前景的解决方案,能够精确控制流体和能量转换,从而促进各种功能单元的集成,在增强软机器人的智能和自主性方面得到了广泛的应用。本文探讨了微流控策略在软机器人中的应用,特别强调了它们对柔性致动器、控制系统和泵的显著影响。此外,本文还讨论了使用微流体开发集成软机器人的进展,并指出了微流控技术在软机器人领域中深度应用所面临的挑战。
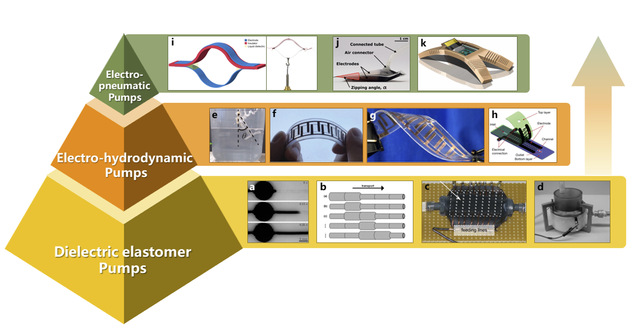
本文重点介绍了微流控策略如何启发和促进柔性致动器、软控制系统和软泵的设计和开发,并讨论了微流控技术解决软体机器人领域关键挑战的思路和方法。例如利用微小流道中的流体行为来控制柔性材料变形,开发基于气压网络结构的柔性致动器;参考微流控片上集成方法,开发基于流体逻辑的柔性控制系统;借鉴电、磁场等微流体控制技术,开发基于电/磁流体动力学的柔性泵。微流控技术不仅成为驱动和控制软体机器人的有效方法,更在开发高度集成、完全自主的无绳化软体机器人方面提供了重要的设计思路和方法。
未来,微流控技术的进步将继续为柔性致动器、控制系统和泵的微型化、集成化、无绳化提供重要灵感,以促使软体机器人从简单单元发展为复杂整体,并在机器、环境和人类交互的场景中产生深远影响。
必赢官网项楠教授/倪中华教授为论文的共同通讯作者,医疗装备系博士生王成为第一作者,该工作得到了国家自然科学基金、江苏省自然科学基金和江苏省“333”项目的支持。